Recent advances in marine technology have redefined the boundaries of nearshore, offshore, and deep-sea exploration. Intelligent control systems and increasingly capable marine robotics—powered by machine learning and the IoT—have extended our reach, taken us to new frontiers, and ultimately opened up new markets.
The current rate of technological progress in our industry is extraordinary. As our clients look to operate at greater depths and further from shore, they naturally demand increasingly rugged, reliable and failproof deck equipment to deploy their ever-smarter assets. This poses a tantalizing conundrum for us marine engineers: how to develop sophisticated handling systems—in particular, winches, LARS, and A-frames—fit for a decade of unprecedented offshore activity.
Our general design philosophy at Okeanus echoes that of the fabled 1960s U.S. Navy principle, KISS (Keep. It. Simple. Stupid.). Over the years, this has resulted in an expanding portfolio of field-proven products suitable for a broad range of applications, but we, the ocean industries, have also learned a lot over the last six decades. One lesson, unquestionably, is that nothing about engineering systems for deployment at sea is ever “simple.” In fact, it can be extraordinarily complex. And this has triggered some of the more pronounced market shifts in recent years, one of which is the growing appetite for custom marine engineering services. In our world: truly fit-for-purpose handling systems, be it through a bespoke build or the modification of an existing solution.
The goal remains the same—to deliver no-nonsense oceanographic hardware—but a “KISS ME” (Keep. It. Simple. Stupid. Marine. Engineering.) approach recognizes that not every challenge can be overcome by the same so-called turnkey solution. Some projects, especially as our clients look to field cutting-edge marine robotics—an emerging fleet of long endurance ASVs, AUVs and ROVs—demand a more partnered approach to problem solving.
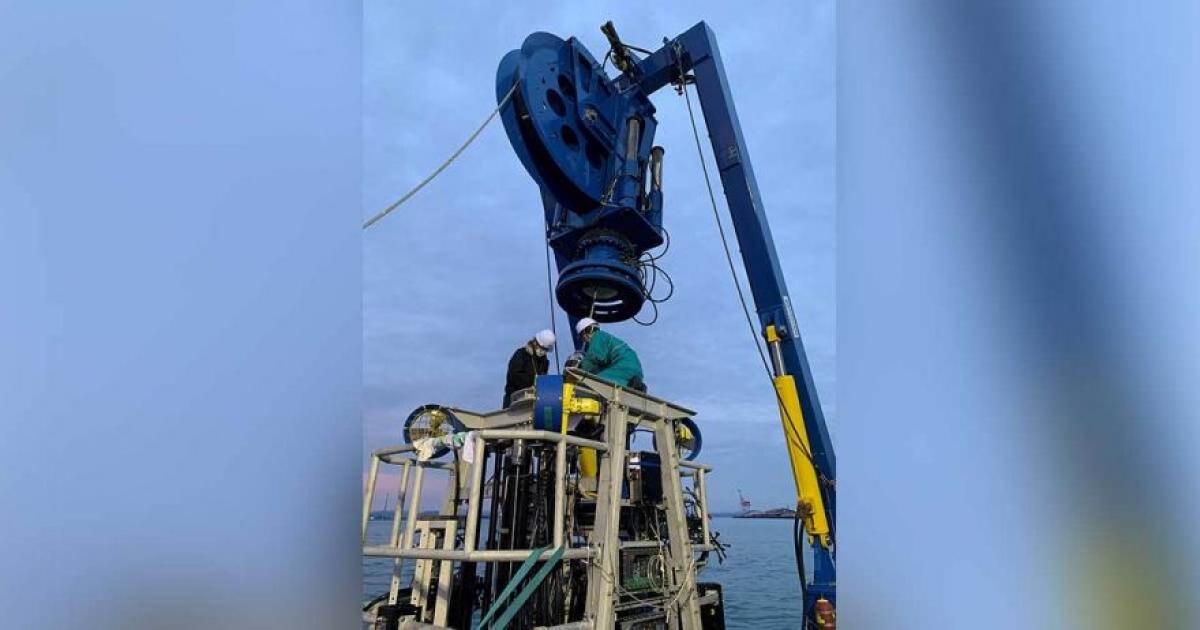
A good example of such collaboration is our recent delivery of an active heave compensated umbilical winch and skid mounted A-Frame style LARS to NiGK Corporation (NIGK), in Japan, designed to integrate with a NiGK deep-sea mining drill before final delivery to the Japan Oil, Gas and Metals National Corporation (JOGMEC). On completion of factory acceptance testing and sea trials, the system was mounted onto a vessel of opportunity and deployed on two separate missions to successfully recover cobalt crust core samples from the sea floor.
Thanks to our ongoing consultation with NiGK, from concept through to production (the final build took place at our Houston HQ), we were able to develop and incorporate a number of exclusive features and modes of operation, such as: a custom telescoping docking head design and assembly (with failsafe latches); full rotation maneuverability; oversized dual groove over-boarding sheave, for use with the umbilical and positively buoyant strain relief; and an operator-adjustable motion damping feature that allows for safe and efficient shipboard launch and recovery operations, even in high sea states. This was the latest in a series of specialized engineering projects specifically designed for safe and mission-critical deployment in deep-sea environments.
But we also know that this this development cycle requires time. It is a phased process of critical stage gates, from conceptual design through to field deployment, each of which demands rigorous testing and evaluation. For that reason, Okeanus Science & Technology also offers a comprehensive suite of rental equipment, for which rapid mobilization comes as standard.


